The Concept
How can we make sense of mathematically-defined objects which live beyond the limits of our three-dimensional universe? Hypercube explores this question through the precision-engineered stroboscopic animation of various lower-dimensional representations of higher-dimensional “cubes”. This one-of-a-kind kinematic art installation challenges rigid spatial intuition and illustrates the beauty inherent in abstract mathematics.
Hypercube is being developed for the Mathematical Art Exhibit at the 2027 Joint Mathematics Meetings, and is partially funded by a grant from the National Science Foundation.
The Exhibit
Hypercube is a stroboscopic 3D zoetrope — a device that creates an optical illusion of motion by synchronizing the rotation of a sequence of static physical models with the frequency of a flashing strobe light. Its subject is the four-dimensional hypercube, also known as the tesseract or 4-cube.
A tesseract is the 4D version of a 3D cube, related to the cube in the same way that a cube is to a square. The key to understanding its geometry lies in observing how its 3D representations — such as projections, cross-sections, or nets — transform as the hypercube is rotated or moved through a higher dimension.
This dynamic transformation is precisely what the zoetrope is designed to illustrate. By sequencing a range of
static 3D representations and animating them stroboscopically, Hypercube builds intuition around higher-dimensional
geometry and makes an otherwise abstract mathematical construction a tangible reality.
Lower-Dimensional Representations
To study a higher-dimensional object, we can consider its representations in our own more familiar 3-dimensional space. Hypercube animates three such lower-dimensional views:
-
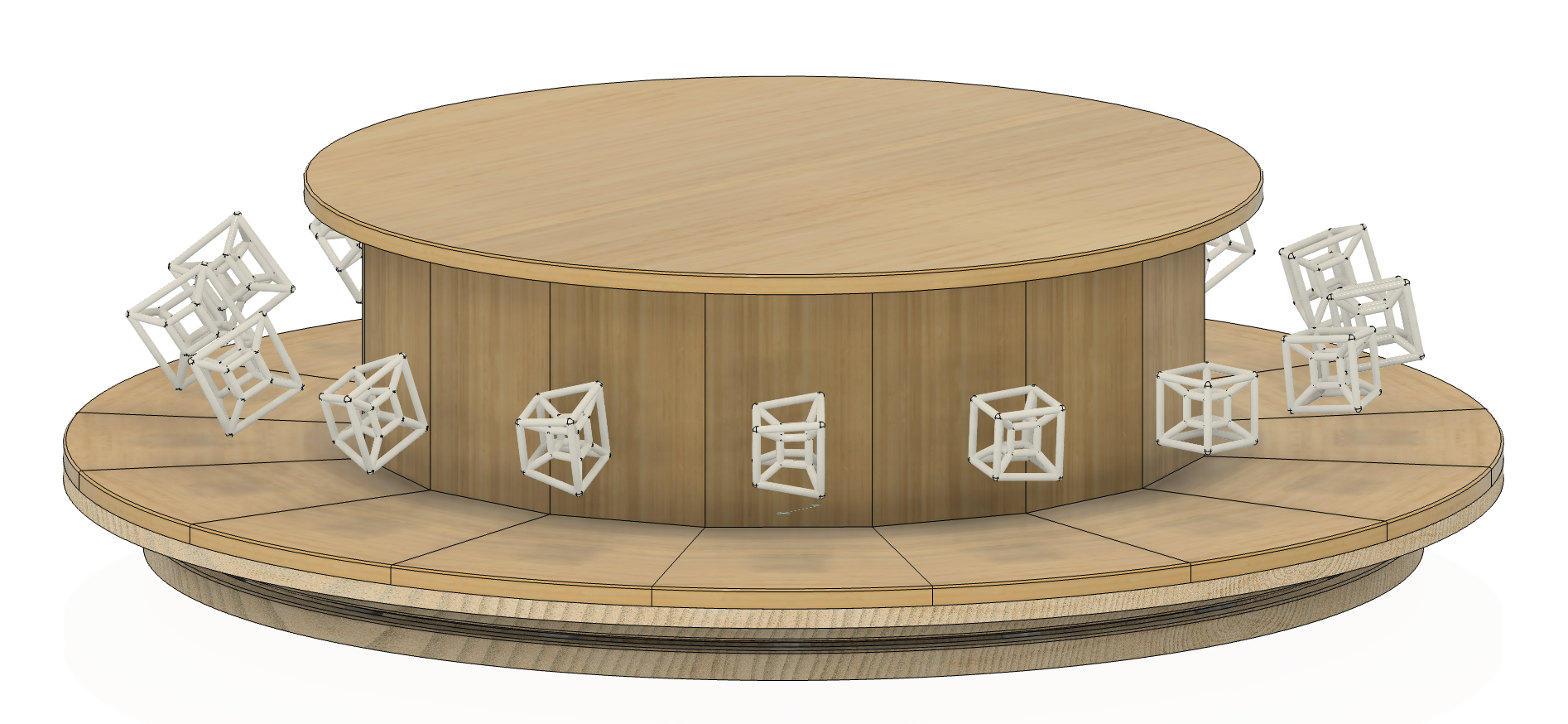
Projection is the mathematical process that describes a shadow. In the same way that a 3-cube casts a 2-dimensional shadow, the projection of a 4-cube (hypercube) is a 3-dimensional object which can be 3D modeled. The zoetrope rendering above shows a sequence of the tesseract’s “shadows” as it performs a so-called double rotation in 4-dimensional space.
-
Cross-sections are lower-dimensional representations of an object formed by “slicing” the object with a hyperplane (the higher-dimensional analog of a plane). This sort of investigaton is similar to how an MRI procedure captures a sequence of 2-dimensional images which are stacked to build up a 3-dimensionalal understanding of the anatomy.
-
Nets are obtained by “opening” the boundary of an object. Just like the net of a 3-cube is a 2-dimensional arrangement of squares, the net of a 4-cube is 3-dimensional arangement of cells.
Through its animation of these three distinct views, Hypercube offers a dynamic and multi-faceted — no pun intended — exploration of a single unseeable object.
Project Status
The prototype design phase for Hypercube is nearing completion. While the primary zoetrope structure is being modeled with CAD using Fusion 360 (and is still a work in progress), the SCAD or STL models for the zoetrope’s 3D printed figures can now be generated through a custom-developed Python + OpenSCAD scripted workflow, which is available and documented in the project’s GitHub repository.
Hypercube’s fabrication phase is scheduled to begin soon. All (manual and CNC) woodworking steps will be completed at the San Diego Fine Woodworkers Association member shop. After the physical construction of the zoetrope’s main rotational assembly prototype is complete, the Arduino-based control system and necessary electronics will be integrated before the prototype can be tested and improved upon for the final version.
Please check back later (or subscribe to the Hyperblog!) for information about project updates.